在开始阅读之前,本文阿婆主默认你已经掌握或者了解以下支撑内容:
玩过游戏
买菜用的数学
图论基础(深度、广度、Dijkstra)
C++编程
非色盲选手
算法简介
A*寻路算法是一种在图形平面上寻找最短路径的有效方法。它被广泛应用于游戏开发、路径规划、机器人导航等领域。
和一些其他的最短路径搜寻算法不同,A星算法是一种启发式的搜索算法,通过评估每个节点的代价来选择最优路径。A星结合了知名的Dijkstra算法和贪心算法的优点,因此被广泛的应用在各个领域,尤其是游戏开发中,对于游戏中AI角色或者NPC角色以及一些自动寻路功能的开发中更是常客。
算法核心概念
对于A星的核心,这里主要讲一下其中的两个核心函数,一是代价函数,第二则是启发式函数。
代价函数$f(n) = g(n) + h(n)$
- $g(n)$:从起点到当前节点$n$的实际代价,也就是已经走过的那部分路径。
- $h(n)$:从$n$到目标点的启发式估计代价(使用启发函数计算得到的距离)。
- $f(n)$:代价评估函数,也即是$g(n) + h(n)$的值,决定了搜索的优先级。

启发式函数
启发式函数(Heuristic Function)是一种用于引导搜索算法的方法,通过估计当前状态到目标状态的最优代价,帮助算法更高效地找到解决方案。它通常用于启发式搜索(如 A* 算法、贪心搜索)中,以减少搜索空间,提高搜索效率。
在路径搜索或状态空间搜索中,启发式函数用于评估一个状态的“优越性”或“接近目标的程度”,从而帮助算法优先探索可能更优的路径。例如,在 A* 算法中,启发式函数用于估计从当前节点到目标节点的最短距离。
常见的启发式函数
1. 欧几里得距离(Euclidean Distance)
$h(n) = \sqrt{(x_{\text{goal} } - x_n)^2 + (y_{\text{goal} } - y_n)^2}$
欧几里得距离计算的是两点之间的直线最短距离,适用于连续空间(如3D世界)或者允许对角线自由移动的环境。
2.曼哈顿距离(Manhattan Distance)
$h(n) = |x_{\text{goal} } - x_n| + |y_{\text{goal} } - y_n|$
适用于只能水平或者垂直移动的环境,比如棋盘网格状的地图中,常见的如迷宫类游戏。
3.切比雪夫距离(Chebyshev Distance)
$h(n) = \max(|x_{\text{goal} } - x_n|, |y_{\text{goal} } - y_n|)$
一般用于允许对角线移动的八方向网格地图中。
下面是这三种常见函数的对比总结:
| 启发式函数 | 适用场景 | 适用游戏类型 | 具体游戏示例 |
|---|---|---|---|
| 欧几里得距离 | 连续空间,适用于自由移动的 3D 世界 | FPS、开放世界、RTS、驾驶游戏 | GTA 5、使命召唤、星际争霸 2 |
| 曼哈顿距离 | 网格地图,只能水平 / 垂直移动 | 2D 像素风、回合制 RPG、战棋 | 火焰纹章、博德之门 3、勇者斗恶龙 |
| 切比雪夫距离 | 允许对角线移动的网格地图 | 战略游戏、棋盘类、生存游戏 | 国际象棋、魔兽争霸 3、暗黑破坏神 2 |
为了方便理解,如果没有特殊说明,后续的示例都是基于 曼哈顿距离作为启发式函数来讲解的。
举个例子,假设存在下面这样一个地图,其中图二是图一的数组化形式,逻辑上他们是等效的:

下面是其中一条最优路径的图示:从(0,0)出发到达(3,3)

对于上面的网格地图来说,如果是启发式函数基于 曼哈顿距离的情况下,该示例的$g(n),h(n),f(n)$的计算结果如下:
| 位置 (x,y) | G(n) (路径代价) | H(n) (曼哈顿) | F(n) = G(n) + H(n) |
|---|---|---|---|
| (0,0) (起点) | 0 | 6 (3+3) | 6 |
| (0,1) | 1 | 5 (3+2) | 6 |
| (1,1) | 2 | 4 (3+1) | 6 |
| (1,2) | 3 | 3 (3+0) | 6 |
| (1,3) | 4 | 2 (2+0) | 6 |
| (2,3) | 5 | 1 (1+0) | 6 |
| (3,3) (终点) | 6 | 0 (0+0) | 6 |
纸上得来终觉浅,建议你掏出压箱底的稿纸和垃圾桶里的2B,自己模拟计算所需的代价函数,强化理解。
注意,为了节省篇幅,这里列出的只是其中一条可行的路径,就这个示例地图来说,可能存在多个最优的选择,并不唯一。
A*算法代码实现(C++)
理解了A星的基本原理之后,接下来我们使用C++实现一个A星的基本算法流程。
0.相关头文件
#include <iostream>
#include <vector>
#include <queue>
#include <cmath>
#include <unordered_map>
#include <algorithm>
1. Node结构
// 节点结构体
struct Node {
int x, y; // 坐标
float g, h; // g: 从起点到当前节点的代价, h: 启发式估价
Node* parent; // 父节点指针, 用于回溯路径
Node(int x, int y, float g, float h, Node* parent = nullptr)
: x(x), y(y), g(g), h(h), parent(parent) {}
float f() const { return g + h; } // 计算总代价 f = g + h
};
g:从起点到当前节点的 真实代价(步数)。
h:当前节点到目标点的 估算代价(启发式函数)。
f = g + h:总代价,A* 总是优先选择 f 最小的节点。
2.定义Compare结构体
// 优先队列比较器, 使得 f 值较小的节点优先出队
struct Compare {
bool operator()(const Node* a, const Node* b) {
return a->f() > b->f();
}
};
由于优先队列
priority_queue默认是 大顶堆(最大值优先),但A*需要 f 值最小 的优先出队,因此这里实现了 小顶堆(f 小的优先)。
3.启发式函数
// 启发式函数: 使用曼哈顿距离(适用于只能水平或垂直移动的情况)
float heuristic(int x1, int y1, int x2, int y2) {
return std::abs(x1 - x2) + std::abs(y1 - y2);
}
- 曼哈顿距离 适用于网格地图(只能水平/垂直移动)。
- 后续也会给出其他几种函数的代码参考,你可以自己更换不同的启发函数来研究不同情况下的
A*
4. A*搜索主方法
// A* 搜索算法
std::vector<std::pair<int, int>> aStarSearch(std::vector<std::vector<int>>& grid,
std::pair<int, int> start,
std::pair<int, int> goal) {
int rows = grid.size(), cols = grid[0].size();
std::priority_queue<Node*, std::vector<Node*>, Compare> openSet; // 优先队列
std::unordered_map<int, Node*> allNodes; // 记录所有访问过的节点
// 创建起始节点并放入开启列表
Node* startNode = new Node(start.first, start.second, 0, heuristic(start.first, start.second, goal.first, goal.second));
openSet.push(startNode);
allNodes[start.first * cols + start.second] = startNode;
// 4个移动方向(右、下、左、上)
std::vector<std::pair<int, int>> directions = { {0, 1}, {1, 0}, {0, -1}, {-1, 0} };
std::vector<std::pair<int, int>> path;
while (!openSet.empty()) {
Node* current = openSet.top(); // 取出当前代价最小的节点
openSet.pop();
// 如果到达目标点,回溯路径
if (current->x == goal.first && current->y == goal.second) {
while (current) {
path.emplace_back(current->x, current->y);
current = current->parent;
}
std::reverse(path.begin(), path.end());
break;
}
// 遍历 4 个方向的邻居节点
for (auto [dx, dy] : directions) {
int nx = current->x + dx, ny = current->y + dy;
// 边界检查和障碍物检查
if (nx < 0 || ny < 0 || nx >= rows || ny >= cols || grid[nx][ny] == 1)
continue;
float gNew = current->g + 1; // g 值 +1 (假设所有移动的代价相等)
float hNew = heuristic(nx, ny, goal.first, goal.second);
int key = nx * cols + ny;
// 如果该节点未被访问或找到更短路径
if (!allNodes.count(key) || gNew < allNodes[key]->g) {
auto neighbor = new Node(nx, ny, gNew, hNew, current);
openSet.push(neighbor);
allNodes[key] = neighbor;
}
}
}
// 释放所有节点的内存
for (auto& [_, node] : allNodes)
delete node;
return path;
}
5.路径字符化(可选)
这不是算法必须的步骤,添加这部分代码主要是用来打印路径字符,直观的理解搜索的结果。
// 可视化打印路径
void printGridWithPath(std::vector<std::vector<int>>& grid, const std::vector<std::pair<int, int>>& path,
std::pair<int, int> start, std::pair<int, int> goal) {
std::vector<std::vector<char>> display(grid.size(), std::vector<char>(grid[0].size(), ' '));
// 初始化网格,障碍物用 '#' 标记
for (int i = 0; i < grid.size(); ++i) {
for (int j = 0; j < grid[0].size(); ++j) {
display[i][j] = (grid[i][j] == 1) ? '#' : '.';
}
}
// 绘制路径
for (const auto& [x, y] : path) {
display[x][y] = '*';
}
// 标记起点和终点
display[start.first][start.second] = 'S';
display[goal.first][goal.second] = 'G';
// 打印网格
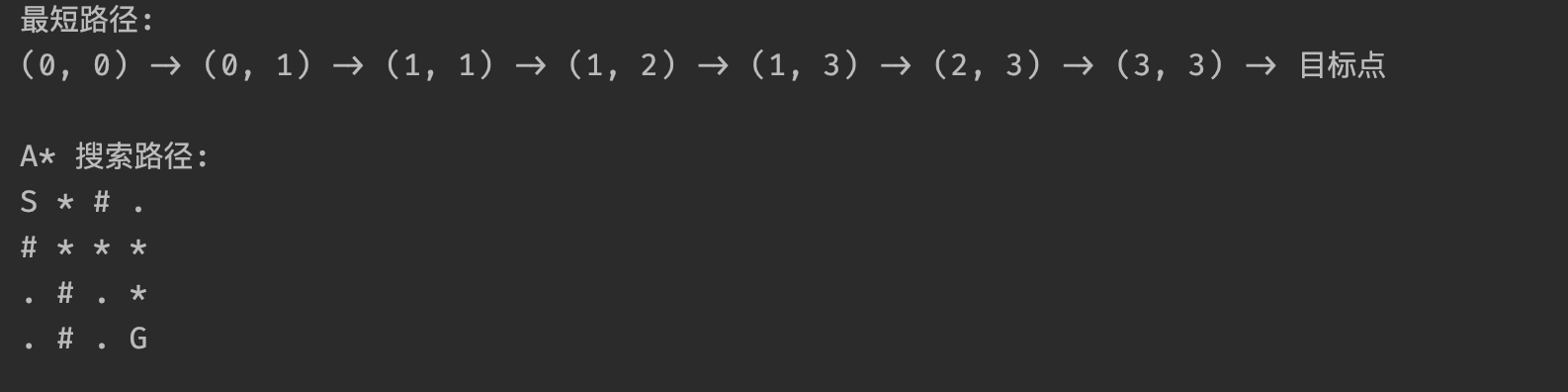
std::cout << "\nA* 搜索路径:\n";
for (const auto& row : display) {
for (char cell : row) {
std::cout << cell << ' ';
}
std::cout << '\n';
}
}
字符化地图说明:
#:障碍物
.:可行区域
*:路径
S:起点
G:终点
5. 主函数
int main() {
std::vector<std::vector<int>> grid =
{
{0,0,1,0},
{1,0,0,0},
{0,1,0,0},
{0,1,0,0},
};
std::pair<int, int> start = {0, 0};
std::pair<int, int> goal = {6, 6};
auto path = aStarSearch(grid, start, goal);
if (path.empty()) {
std::cout << "未找到可行路径!" << std::endl;
} else {
std::cout << "最短路径:\n";
for (auto [x, y] : path)
std::cout << "(" << x << ", " << y << ") -> ";
std::cout << "目标点\n";
printGridWithPath(grid, path, start, goal);
}
return 0;
}
关于A*的一些优化方向
原生的A星算法已经相对高效,但是在大规模地图或者复杂路径规划的问题中可能会遇到性能瓶颈。因此具体的优化方向还得取决于具体的问题,这里只是列出一些常见的优化方向,作为学习指南。
数据结构上的优化
这里的数据结构优化基于本文实现的代码而言。
A* 依赖 openSet(开启列表),当前实现使用的是 std::priority_queue,但是 std::priority_queue 不支持高效的更新操作,这可能导致节点重复入队并降低性能。
因此,可以使用std::unordered_map+最小堆进行优化:
std::unordered_map存储节点索引,最小堆(Binary Heap)用于快速取出f(n)最小的节点。- 需要额外维护一个哈希表来存储节点的位置,以支持 堆的 decrease-key 操作。
启发式函数的选择
这个没啥说的,最基本的原则就是根据项目的类型来选择不同的启发式函数。
逻辑上的优化
常见的优化方向有:
- 双向
A*:同时从起点和终点进行搜索,相遇时停止。 - 跳点搜索(
JPS):跳过冗余的节点,适用于规则网格地图,可以极大的减少搜索空间。 - 图割方法(对称
A*):在动态地图中,分割图像区域,减少搜索范围。
欢迎关注后续更新….